Control award
Autonomous Objectives: Our goal for autonomous is to knock down the correct jewel, decipher the pictograph and put the preloaded glyph into the correct spot, get another glyph and put it into another spot, and then park in the safe zone.
Sensors Used: Color sensor, IMU (inertial measurement unit), touch sensor, range sensor, these sensors allow more precise movement in autonomous.
Key Algorithms: Color sensing, precise movement, distant sensing, PID (Proportional Integral Derivative), these things allow more accuracy and precision. For our glyphs, we have an interesting way of getting them. We have sidebars, but we throw the first glyph up in the air, and catch it with the top of the sidebars, making our getting of glyphs more time efficient. We also added a guide tube so the glyph will go to the right spot.
Driver Controlled Enhancements: Encoder arm, slowdown mode, this allows the movement to be more precise and more accurate. Also, the sidebar thing wrote at the end of Key Algorithms.
Engineering Notebook References: Check code and controls in software section.
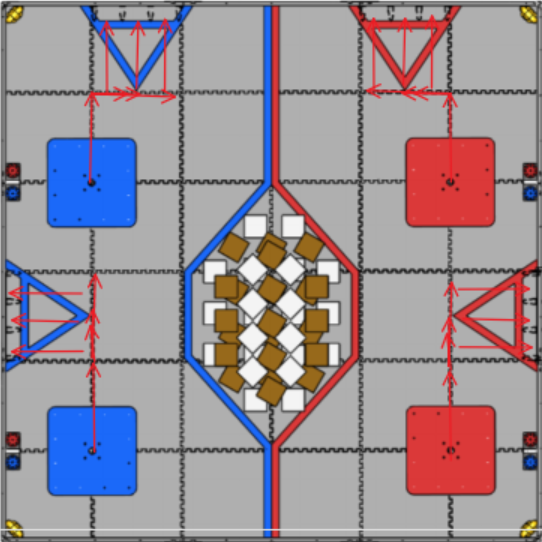
Autonomous Program Diagrams: